Convex Hull Algorithms

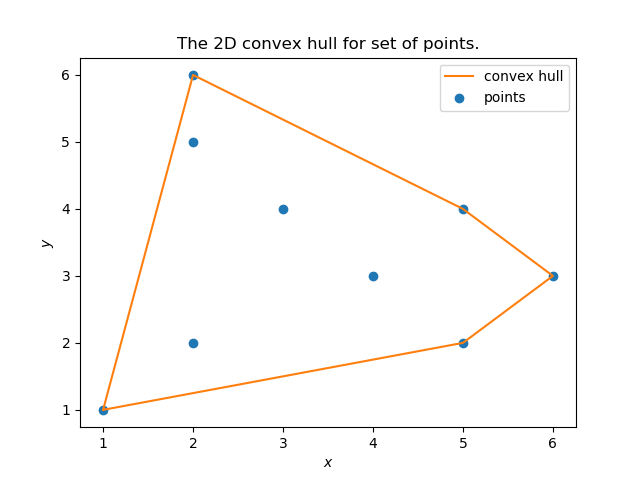
Given a cloud of points on a 2D plane, a convex hull is the smallest convex polygon which encloses all of the points.
Another useful concept related to convex hulls is the minimum bounded rectangle. The minimum bounded rectangle is the smallest rectangle (measured by area) which encompasses the entire convex hull (by extension, it is also the smallest rectangle that encompasses all points).
The minimum bounded rectangle must have an edge which is co-linear to one of the edges in the convex hull.
The Jarvis March (Gift Wrapping Algorithm)
Orientation:
- If they are co-linear
- If they are clockwise
- If they are counter-clockwise
This equation comes from the 3D definition of the cross-product (for a proof, see here).
- Pick one point that is guaranteed to lie in the convex hull. This can be done by picking the left-most point (i.e. has the lowest x value). If there is more than one point that meets this condition, you are free to choose any one. Add this to the start of list of the
convex_hullpoints. - Pick any other point to be the potential
next_pointon the hull. - Iterate over all the points, checking the orientation between the
last_pointfound on the hull, the potentialnext_point, and theloop_pointyou are currently iterating over. If the orientation is counter-clockwise, thenloop_pointis to the left of the line formed betweenlast_pointandnext_point, and becomes thenext_point. - Once you reach the end of the loop,
next_pointis guaranteed to be the correct next point on the convex hull. Append this to theconvex_hulllist. - Repeat steps 2 to 4, until you end up adding the same point to the
convex_hulllist as you started with (the left most point). - Done!
Scipy
scipy provides a ConvexHull object which can be used to calculate a convex hull from a set of points.
Shapely
The Shapely library for Python has built-in support for finding the minimum bounded rectangle for a generic geometry type. Shapely can find the minimum bounded rectangle for polygons, point sequences, etc.
BaseGeometry.minimum_rotated_rectangle()Polygon([ [1, 1], [2, 1], [5, 4], [4, 3], [6, 2],])Other Resources
https://www.geometrictools.com/Source/ComputationalGeometry.html contains some useful geometric algorithms for C/C++, including convex hull algorithms and code for finding the minimum bounding box/volume/circle/sphere etc.
https://stackoverflow.com/questions/13542855/python-help-to-implement-an-algorithm-to-find-the-minimum-area-rectangle-for-gi contains useful information to find the minimum bounded rectangle.
https://www.geometrictools.com/Documentation/MinimumAreaRectangle.pdf is a very detailed and precise explanation on how the minimum bounded rectangle algorithm works. See here for a cached copy.