Inductors

Inductors are passive, 2 pin electronic components which store energy as a magnetic field. They are made by coiling wire around a material (be it air, or something else). They are well used but due to their bulk, cost and usefulness, are not as common as resistors or capacitors in electronic circuits.

The mechanical equivalent of an inductor is mass. The larger the inductance, the larger the mass. This is when using the force-voltage equivalence.
Two inductances which are in close proximity can couple with each other; this is called mutual inductance. This is the basic principle behind a transformer.
Inductors are used in many things, including:
- Common-mode chokes
- Ferrite beads
- Transformers
- Switch mode power supplies (e.g. buck and boost converters)
- Pi/T filters
How They Work
When current is flowing through an inductor, some electrical energy is converted and stored as magnetic energy in the inductor’s magnetic field. Inductors like staying at a constant current, and they “actively resist” current changes. They do this by generating a voltage across their terminals which resists the change in current.
The defining equation relating the voltage, inductance and change in current is:
where:
is the voltage across the inductor
is the inductance of the inductor
is the instantaneous change in current through the inductor
Schematic Symbols and Designator
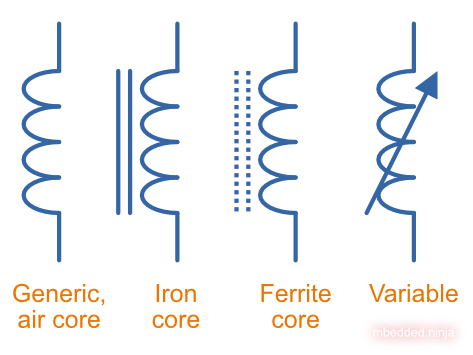
There are a few common schematic symbols for an inductor. L is almost always used as the designator prefix on schematics, e.g. inductors will be named L1, L2, etc. The image below shows the symbols used for common sub-families of inductors. Not all circuit designers will be specific and use a special symbol to indicate iron/ferrite cored inductors (vs. air-cored inductors), and the generic symbol may be used for all types.
Important Parameters
Inductance
- Symbol:
- Units: Henries (or Henrys) ()1
The main thing you care about! The inductance determines the relationship between the rate of change in current through the inductor and the inductor’s voltage. It determines the voltage the inductor will generate in response to a specific rate of current change. This parameter is used to calculate its impedance, for a given frequency.
K-factor
The K-factor (a.k.a.) coupling coefficient is a fractional value of the amount of flux linkage between two coils. It is not applicable for a single inductor, but is a useful property when describing transformers.
DC resistance
- Symbol:
- Units: Ohms ()
The DC resistance is the resistance of the inductor’s coil of wire, measured at DC. You can use this to calculate resistive losses through the inductor. An ideal inductor has no DCR. The DC resistance of an inductor can be easily measured by a good quality multimeter or benchtop Ohm meter. For a fixed volume, a larger valued inductor usually has a higher DCR as it has a larger number of thinner gauge turns.
Typical DC resistances range from to .
Self-resonant Frequency
- Symbol:
- Units: Megahertz ()
The self-resonant frequency of an inductor is the frequency at which the parasitic capacitance of the inductor resonates with the inductance, resulting in a very high impedance (e.g. open circuit).2 The inductor stops behaving like an inductor above the self-resonant frequency.
The plot below shows the inductance vs. frequency for the Vishay Dale IHLP1212BZER1R0M11 inductor. The self-resonant frequency occurs where the inductance spikes at about 70MHz:

The equation for the SRF is4:
where:
is the inductance in Henries
is the parasitic capacitance, in Farads
is the self-resonant frequency, in Hertz
The main contributor to the parasitic capacitance is the distributed capacitance between the coil windings.
Types Of Inductors
Ferrite Drum Core Inductors
Ferrite drum core inductors can be optionally shielded. They allow for high saturation currents and high inductances (due to having a large number of turns).
Toroidal Inductors
Flat Coil Inductors
Flat coil inductors have a very low profile (height from the surface of the PCB) allowing use in space-constrained designs. Flat coil inductors usually have a low number of turns, resulting in less inductance than ferrite drum core or toroidal inductors. The core is typically made up of powdered iron.
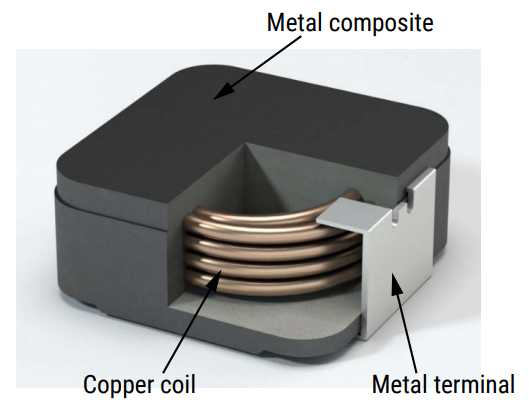
Metal Composite Inductors
Metal composite inductors (also called moulded power inductors) are made with metal powders moulded around copper windings at high pressure.
Air-cored Inductors
Air-cored inductors represent any inductor which contains no ferromagnetic material. This means that “air-cored” inductors also covers a range of inductors which use an insulator instead of air for the core, which includes materials such as glass or PTFE.
Advantages
- Unlike a ferro-magnetic cored inductor, an air-cored inductor’s inductance does not vary with the amount of current flowing through it. Ferromagnetic cores work fine up until a point at which they saturate.
- Air-cores do not have any iron losses. This advantage becomes more significant with increasing frequency.
Disadvantages
- Air-cored inductors have to have more and/or larger turns to achieve the same inductance value as a ferro-magnetic core. This is because ferro-magnetic cores have a higher permeability than air.
- Air-cored inductors radiate more electromagnetic fields over a wider area, and also pick up more radiation. This is because ferro-magnetic-cores constrain the magnetic field lines better.
Ferrite Beads
See the Ferrite Beads page.
Common Core Materials
Air Core
Air core is used to describe any inductor which does not use a magnetic material for its core (so they may in fact, have something other than air for their core). Used in low inductance, RF applications because they lack any magnetic core to boost their inductance, but at the same time benefit from smaller core losses which can be significant in the RF spectrum. Go to the Air-Cored Inductors section for more info.
Powdered Ferrite Core
The powder is compressed into blocks before using (but don’t confuse these with solid ferrite core inductors). Very lossy (resistive) at high frequencies. Used to make ferrite beads.
Solid Iron (or Steel) Core
Used in low resistance, high inductance applications. It saturates more readily (has a lower saturation current) than a powdered iron core.
Powdered Iron Core
Powdered iron core inductors have a distributed air gap, which gives them a higher saturation current than solid iron cored inductors.
Metal Composite
While ferrite cored inductors seem to have similar current ratings (based on thermal performance) as their saturation current, metal composite inductors typically have a saturation current between 1-2x their current rating (e.g. a current rating of 3A, and a saturation current between 3-6A).
Inductors In Series And In Parallel
The behaviour of inductors when connected together in series and in parallel is exactly the same behaviour resistors exhibit, and exactly the opposite behaviour of what capacitors exhibit.
Inductors In Parallel
When two inductors are connected in parallel, the equivalent total inductance follows the inverse law, as long as there is no mutual coupling of their magnetic fields:
It is usually easier to remember this equation as:
The image below shows this:

Inductors In Series
The equivalent inductance of two inductors connected in series is the sum of the individual inductances, as long as there is no mutual coupling of their magnetic fields.
The image below shows this:

The Energy Stored In An Inductor
The energy stored in a inductor is given by:
where:
is the energy stored in the inductor, in Joules
is the inductance of the inductor, in Henries
is the current flowing through the inductor, in Amps
This equation is only valid when the inductor is operating in its linear region, that is, before the current reaches the point where the magnetic field begins to saturate. Notice that it is similar to the equation for energy in a capacitor.
The Impedance Of An Inductor
Simple Model
An ideal inductor (no parasitic elements) has an impedance given by:
where:
= inductor’s impedance, in Ohms ()
= frequency of analysis, in Hertz ()
= inductance of inductor, in Henries ()
This shows that the impedance goes up as the frequency goes up. At DC levels, the inductor has no impedance and acts like a short-circuit, while at high frequencies the inductor approaches an open-circuit.
You may also see this written as:
where:
= radian frequency (rad/s) (which is equal to )
For a more accurate but complex model, see the Parasitic Model section.
Parasitic Model
An inductor with parasitic components may be modelled by:
where:
= inductor’s impedance ()
= parasitic parallel resistance (which is negligible for most simulations) ()
= frequency of analysis ()
= inductance of inductor ()
= parasitic series resistance ()
= parasitic parallel capacitance ()
The main parasitic components are the series resistance () and the parallel capacitance (). The series resistance arises from the resistance of the coil of wire which makes up the inductor. The thinner and longer the coil, the larger this resistance. The parallel capacitance is due to coil windings being very close to one another, each coil forming small capacitors to surrounding coils. These small capacitors can be lumped together and form the parallel capacitance.
This model is a pretty good representation for most simulation purposes, and gives that characteristic decrease in performance (non-inductor-like behaviour) at high-frequencies.
Typical values might be:
Inductor Kickback
Inductor kickback is when the current through an inductor is quickly stopped, usually by making an open circuit. Because inductors “want to keep the current flowing”, they generate a very large voltage spike in attempt to keep the current going. This large voltage spike can jump switch gaps, fry MOSFETs, destroy other sensitive circuitry, and give people dangerous shocks.
A more technical way of looking at kickback is by analysing the voltage-inductance equation. From this it should be obvious that the inductor’s voltage is proportional to the change in current. Making an inductor open-circuit is creating a very large change in current, and hence it produces a very large voltage spike.
Inductor kickback is a significant design issue when using relays or motors.
Saturation Current
- Symbol:
- Units: Amps ()
Inductors only behave like inductors over a limited current range. The saturation current is the maximum current the inductor can take before it stops working like an inductor. It is not a sudden point, but rather defined as when the inductance drops to a fixed percentage of its nominal value. Above this point the magnetic field does not increase proportionally with the current (the core is “saturated”), the apparent inductance decreases, and the current rises and falls much faster — which can cause it to shoot up to dangerous levels. It is not the same thing as the rated current.
Saturation is the state reached when an increase in applied external magnetizing field H cannot increase the magnetization of the material any further.
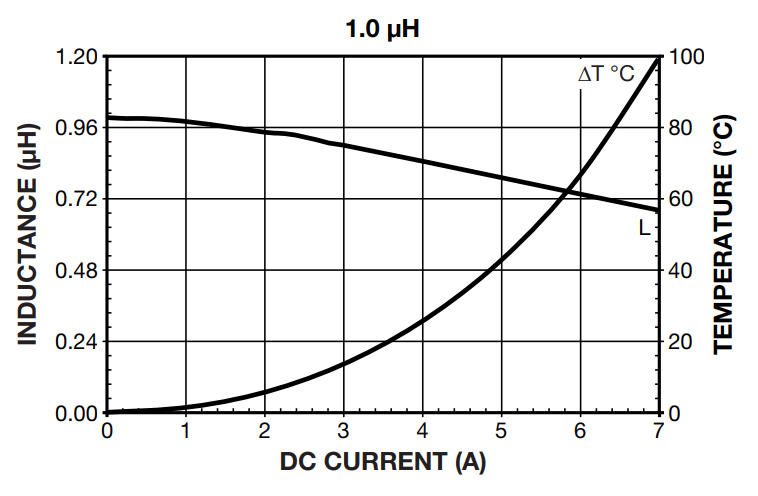
For example, Vishay Dale specifies the saturation current for its IHLP-1212BZ-11 family (datasheet) of inductors as the current at which the inductance drops 20% down from the value at 0A (its rated inductance)3. The image below shows the inductance vs. DC current plot for the IHLP1212BZER1R0M11 inductor in this family, which has a saturation current of 4.5A.
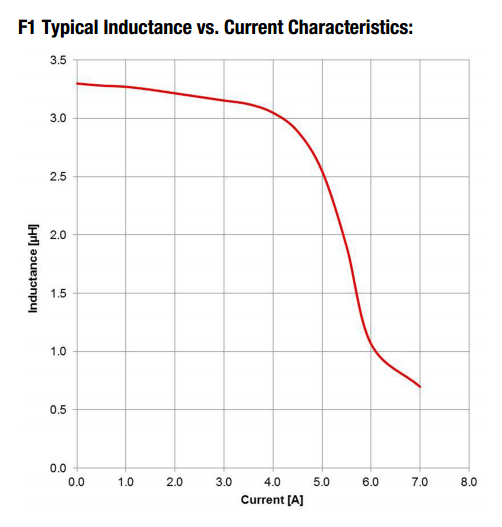
The image below shows another typical inductance vs. current curve, this time for a ferrite core SMD inductor that could be used on a 3A SMPS design (the Wurth 7447789003, a 3.3uH inductor with a specified saturation current of 4.2A). Notice how once the current increases beyond this point, the inductance drops off rapidly.
Typical saturation currents range from 10-100mA for small inductors, up to 1-10A for larger PCB mount inductors.
As governed by the basic induction equation, applying a constant voltage across an inductor will lead to a linear increase in current. This will be the case until the saturation point, at which the current will begin to increase more rapidly, until it reaches a limit determined only by the DC resistance of the windings.
Reaching saturation is not always a bad thing. Saturation is desirable in self-switching power supplies, timing circuits and blocked oscillators, and saturable-core transformers (e.g. arc welding). It is not desirable in typical SMPS, or power/signal transformers.
Rated Current
- Symbol:
- Units: Amps ()
The rated current is the maximum average DC current allowed before the inductor gets “too hot”. “Too hot” is usually defined as a fixed temperature rise above ambient (e.g. ) due to resistive losses in the copper winding, measured when the inductor is mounted using a standard footprint on a standard PCB (both defined by the manufacturer). Inductors can usually handle current peaks above the rated current, as long as the average is still less.
Saturation Current vs. Rated Current
There are usually two maximum current ratings on an inductor’s datasheet, the saturation current and the rated current.
Confusing? The simplest design approach is to pick the lower of the two maximum currents and treat that as the maximum allowed through the inductor. A seasoned designer will realise that the rated current is not applicable to short current peaks, and so it is safe to exceed it for brief periods of time, as long as the saturation current is not exceeded (in some cases, even exceeding the saturation current limit is o.k. or even desirable — see the Saturation Current section for more info).
How To Measure Inductance In An Electronics Lab
Inductor markings can be confusing (or completely absent!), making it hard to determine the part number and inductance of a particular inductor. Additionally, basic multimeters have no ability to measure inductance. Luckily, there are many ways to measure inductance in a laboratory setting.
Measuring Inductance with a Signal Generator and Oscilloscope
One way to measure the inductance of an inductor is with a signal generator and oscilloscope.5
-
Set the signal generator to:
- Waveform:
Sine wave - Voltage:
1 V peak-to-peak - Frequency:
10 kHz - Output type:
High-Z
- Waveform:
-
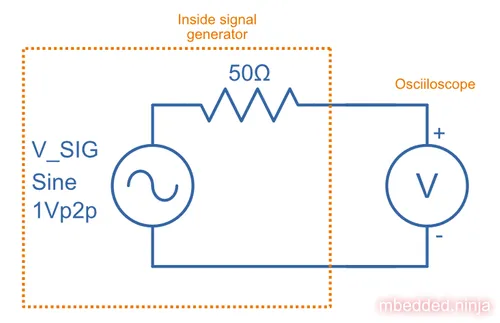
Connect the oscilloscope to the signal generator and measure the open-circuit voltage. It should be about 1 V peak-to-peak. Record down the exact peak-to-peak value, as signal generators are not usually that accurate with their voltages!
-
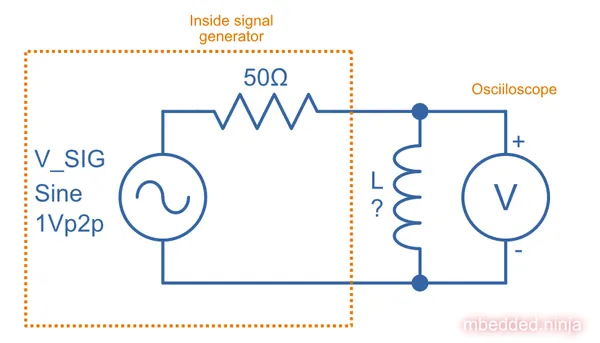
Now connect the inductor to the signal generator, whilst still measuring the voltage with the oscilloscope (this will be the output voltage of the signal generator, as well as the voltage across the inductor). The circuit should look like the image below:
-
Adjust the frequency of the signal generator until the peak-to-peak voltage across the inductor is half the measured open-circuit peak-to-peak voltage.
-
Calculate the inductance! It is equal to:
where:
is the frequency in Hertz at which the inductors peak-to-peak voltage was half the signal generators open-circuit peak-to-peak voltage
is the output impedance of the signal generator (measure and tweak this value for a more accurate calculation)
is the calculated inductance, in Henries

How It Works
The internal resistance of the signal generator and the inductance form a voltage divider. The impedance of the resistor stays constant at no matter the frequency, but the impedance of the inductor does change with frequency (). You vary the frequency until the voltage at the mid-point of the voltage divider is half the source voltage. Note that this is not the point at which the two impedances are equal — because the resistor and inductor impedances add in quadrature (they are 90° out of phase), the half-voltage condition actually occurs when , as the derivation below shows.
We arrive at the equation for the inductance by using the voltage-divider rule for a complex circuit:
Simplifying:
Now let’s separate the equation into a real and imaginary part:
Now we can take the magnitude of this and simplify:
We’ve got it to a point where it is as about as simple as you can write it! Next up, let’s substitute with , as this was the condition we were tweaking the frequency for (peak-to-peak voltage measured across inductor by the oscilloscope was half the peak-to-peak voltage generated by the signal generator).
Now we just sub in to get the final equation:
Manufacturer Part Numbers
- DR1050: Series of inductors by Eaton (previously Cooper Bussmann).
- NRx: Popular series of inductors from Taiyo Yuden.
xdenotes the coating resin, options areNR,NRH,NRSandNRV. The series contains a number of different SMD package sizes and inductances.
Inductor Packages
Unfortunately for the PCB designer, almost all SMD inductor packages are non-standard and unique to the manufacturer and series.
Footnotes
-
Wiktionary. henry. Retrieved 2022-07-10, from https://en.wiktionary.org/wiki/henry. ↩
-
everythingRF. What is Self Resonant Frequency (SRF) in Inductors?. Retrieved 2022-07-11, from https://www.everythingrf.com/community/what-is-self-resonant-frequency. ↩
-
Vishay Dale. IHLP-1212BZ-11: IHLP Commercial Inductors, Low DCR Series [datasheet]. Retrieved 2022-07-11, from https://www.vishay.com/docs/34289/lp12bz11.pdf. ↩ ↩2 ↩3
-
Coilcraft (2003, Sep 16). Document 363-1: Measuring Self Resonant Frequency. Retrieved 2022-07-11, from https://www.coilcraft.com/getmedia/8ef1bd18-d092-40e8-a3c8-929bec6adfc9/doc363_measuringsrf.pdf. ↩
-
Ronald Dekker. A Simple Method to Measure Unknown Inductors. DOS4Ever. Retrieved 2022-07-06, from https://www.dos4ever.com/inductor/inductor.html. ↩ ↩2