4-20mA Current Loops

The 4-20mA current loop protocol is an analogue electrical communication protocol. It is based around a current loop from transmitter to receiver that is varied between 4-20mA under normal operating conditions. This signal is usually used to represent 1 continuously varying measurement such as temperature, pressure, etc.
The first uses of the 4-20mA current loop appeared in the 1950s.
Protocol
The reason that the valid range is set between 4-20mA and not say, 0-20mA is so that no current can be used to signify that the transmitter is either not connected or not working correctly.
It also allows devices to be self-powered from the current-loop, as long as the devices consume more than 4mA. The 0-20mA protocol does not allow for self-powered devices.
Types
2-Wire
In the 2-wire variant, both the power and signal are transmitted over the same pair of wires. These are called self-powered or loop-powered devices.
2-wire sensors (the transmitters), draw a continuous amount of current, usually less than 4mA, to keep themselves powered and operating. They then draw a variable amount of extra current to keep the total between 4-20mA and to perform communication.
2-wire sensors can be powered/measured with either a low-side or high-side shunt, the shunt being an additional resistor to measure the current the sensor is drawing.
3-Wire
The 3-wire variant uses two wires for power and ground, and then shares the third wire for the 4-20mA current signal, with its return path being shared with the ground wire.
4-Wire
The 4-wire version has a differential pair for the current signalling, which is not shared by the power source.
Transmission Distances
Because the current-loop protocol is resistant to voltage drops over lengths of cabling (the current through all the series elements remains the same!), the current-loop protocol can work over large distances. It is insensitive to various noise sources that would otherwise affect voltage-based communication protocols.
A transmission distance of up to 5km or more through standard signal/data cabling is not unusual. The limiting factor is when the voltage drop in the cable exceeds the maximum voltage that is powering the current source (the system voltage).
Standards
ISA S50.1
The ISA S50.1 standard initially defined both 4-20mA and 10-50mA as possible current ranges. However, the 10-50mA was then later dropped.
NAMUR NE43
NAMUR, an international association of process instrumentation companies, made a recommendation called NAMUR NE43 to standardise sensor fault indication on the 4-20mA current-loop protocol.1
The “standard” defines any current below 3.6mA or above 21mA as a sensor fault. This signal needs to be present for at least 4 seconds before it is considered a fault.
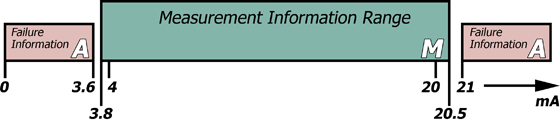
The standard also extends the normal operation 4-20mA current range to 3.8-20.5mA, allowing more measurement information to be communicated.
4-20mA devices that use this specification usually state Compliant to NAMUR NE 43.
Applications
The 4-20mA current-loop communication protocol is used by many industrial sensors to return the value of the property they are measuring. These include:
- Temperature
- Position
- Speed
- Pressure
- Strain
Interfacing To A Microcontroller
A 4-20mA current loop signal can be easily interfaced to a microcontroller which has an ADC.
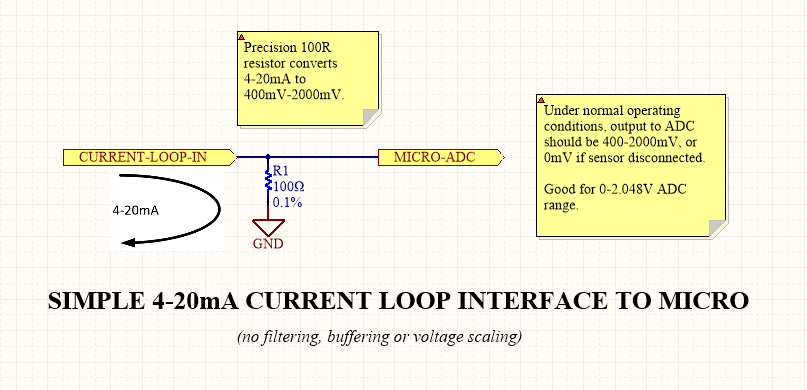
A Simple Interface
The schematic below shows probably the simplest 4-20mA interface you could build to an ADC on a microcontroller. It uses just a single, precision (100\Omega) resistor to convert the 4-20mA signal into a 400-2000mV voltage.
The value of the resistor can be changed to modify the voltage range that the ADC measures. Below is a table of common resistors that are used and the voltage ranges they give:
| Resistance | Voltage Range |
|---|---|
| (50\Omega) | (0.2-1V) |
| (100\Omega) | (0.4-2V) |
| (250\Omega) | (1-5V) |
| (500\Omega) | (2-10V) |
Filtering And Buffering
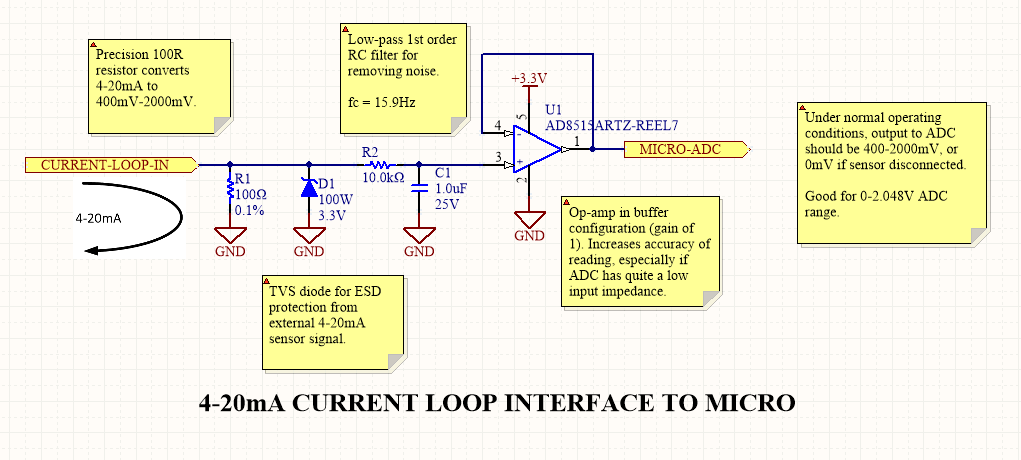
The schematic below shows how you can convert the 4-20mA current loop into a voltage signal suitable for the ADC, along with a low-pass filter and buffering circuitry.
Noise
4-20mA current loops can be thought of as a low-impedance communication protocol, as the low-valued resistor at the destination effectively makes the input impedance very small. This reduces the amount of induced noise on the input signal (i.e. the noise has to be of a higher power to produce the same voltage change).
Out-of-band Signalling
Some devices use currents lower than 4mA or higher than 20mA to communicate extra information. This is called out-of-band communication.
For example, a distance sensor might use 3.5mA to signal that the object is too close, and 20.5mA to signal that the object is too far away.
The NAMUR NE43 standard specifies any current below 3.6mA or above 21mA should be treated as an error condition.
HART
The HART communication protocol (Highway Addressable Remote Transducer) is a separate communications protocol which can communicate on the same wires as the 4-20mA current loop protocol.
It transmits one or more digital signals which are superimposed onto the 4-20mA current signal.
Over-voltage Dangers
Because the communication protocol is based on a current, the voltage at the receiver end is dependent on the resistor you choose to convert the current to a voltage. Care has to be taken to make sure that the resistance is low enough that produced voltage will never exceed the maximum input voltage of the receiving device (e.g. the ADC of a microcontroller).
This includes looking at all possible out-of-band signalling scenarios that the transmitter supports. For example, although the transmitter might say it follows the 4-20mA protocol, it may be designed to transmit 30mA under certain fault conditions.
Multiple Receivers
While the 4-20mA current-loop protocol can only have one transmitter, it does support multiple receivers. These receivers have to be connected in series, and you have to make sure the total voltage drop across all of the receivers does not exceed the maximum voltage that the system, or the transmitter, supports.
4-20mA Transmitters
4-20mA transmitters can be built either using discrete circuitry (usually involving an op-amp), or with dedicated ICs.
The Voltage-To-Current Converters page has more info (including schematics), on how to build 4-20mA transmitters.
The Burr-Brown (now Texas Instruments) XTR115, XTR116, XTR117 are loop-powered 4-20mA current loop transmitters. Their typical application schematic is shown below.
Footnotes
-
DIVIZE industrial automation. Namur NE43. Retrieved 2026-06-03, from https://www.divize.com/techinfo/namur-ne43.html. ↩