October 2019 Updates
| Date Published: | |
| Last Modified: |
Updated the mv (move) page with information on using extended bash glob extensions to provide exclusion patterns.
1 2$ mkdir new_sub_dir # Create a new sub-directory to move all files/directories in PWD into $ mv !(new_sub_dir) new_sub_dir # Move all files/directories in PWD into new_sub_dir, excluding new_sub_dir itself (avoiding the obvious recursion problem)The Introduction To Rotation Matrices page has been updated with tutorials/example on how to combine rotation matrices and how to calculate the rotation matrix to describe the rotation between two reference frames, as well as a section on how to convert RPY (roll-pitch-yaw, or Euler angles) to rotation matrices.
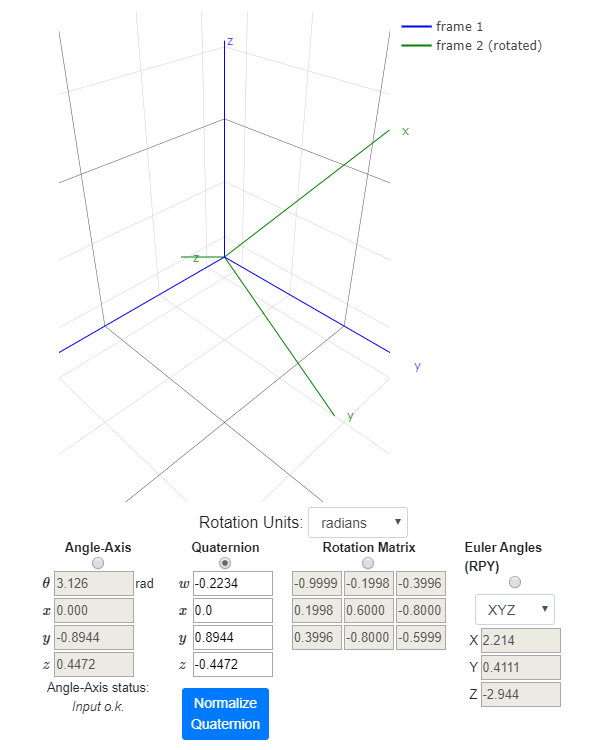
$$ \mathbf{R} = \begin{bmatrix} \hat{u_x} & \hat{v_x} & \hat{w_x} \\ \hat{u_y} & \hat{v_y} & \hat{w_y} \\ \hat{u_z} & \hat{v_z} & \hat{w_z} \end{bmatrix} $$Added an interactive 3D rotation visualizer to the Quaternion page, which shows you how a right-hand coordinate system XYZ is rotated in 3D space by either a rotation matrix, quaternion, or angle-axis rotation. This tool is also very useful to convert between the three ways of describing a rotation (when you enter a rotation in one notation, the other two get updated automatically).
Authors


This work is licensed under a Creative Commons Attribution 4.0 International License .