June 2023 Updates
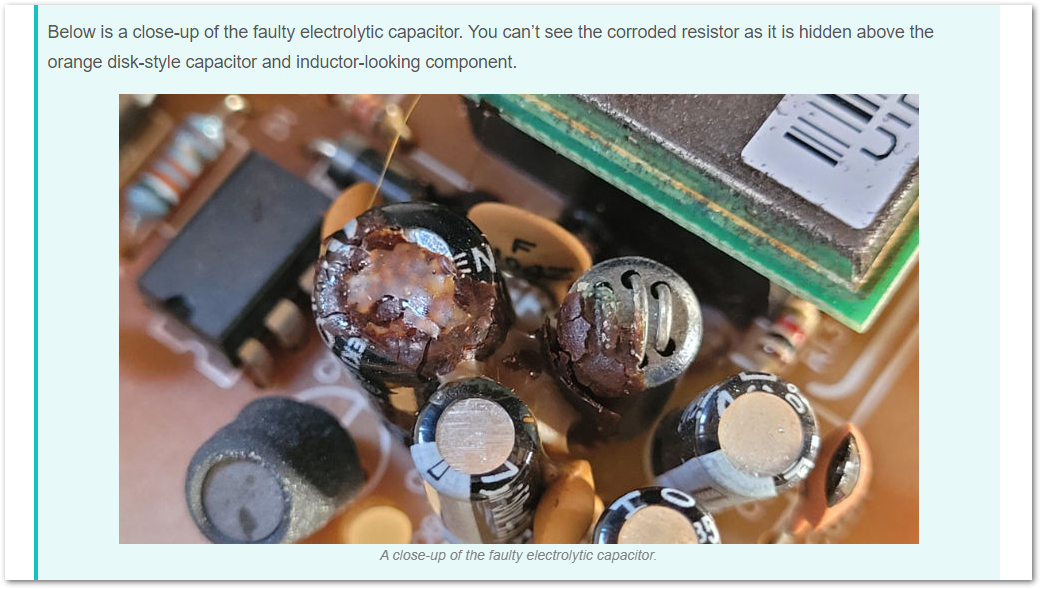
Added information about electrolyte leakage in electrolytic capacitors.
Fixed bug which resulting in the embedded circuitjs iframe’s from being displayed correctly (unsure of what was caused the problem to occur in the first place).
Added info on differences between “solid” and “wet” tantalum capacitors.
Added a new
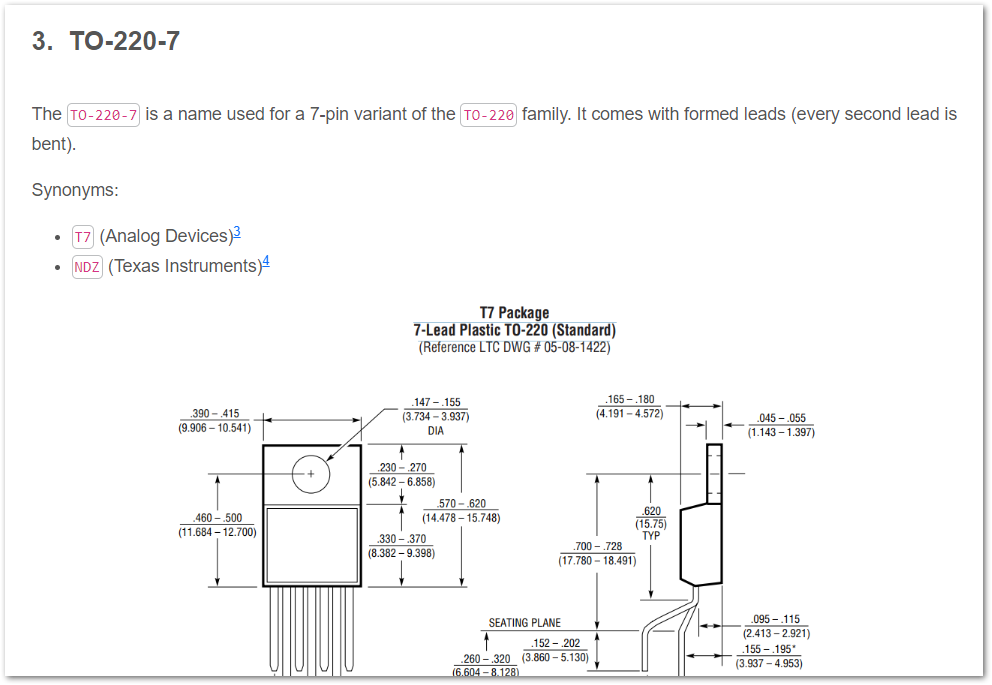
asideshortcode for Markdown and changed the styling of the asides (called admonitions in AsciiDoc) so that the title and icon are a top-bar rather than a side-bar (looks better when there is longer content in the aside).Added info on the TO-220-7 and TO-220-7C variants of the TO-220 component package family.
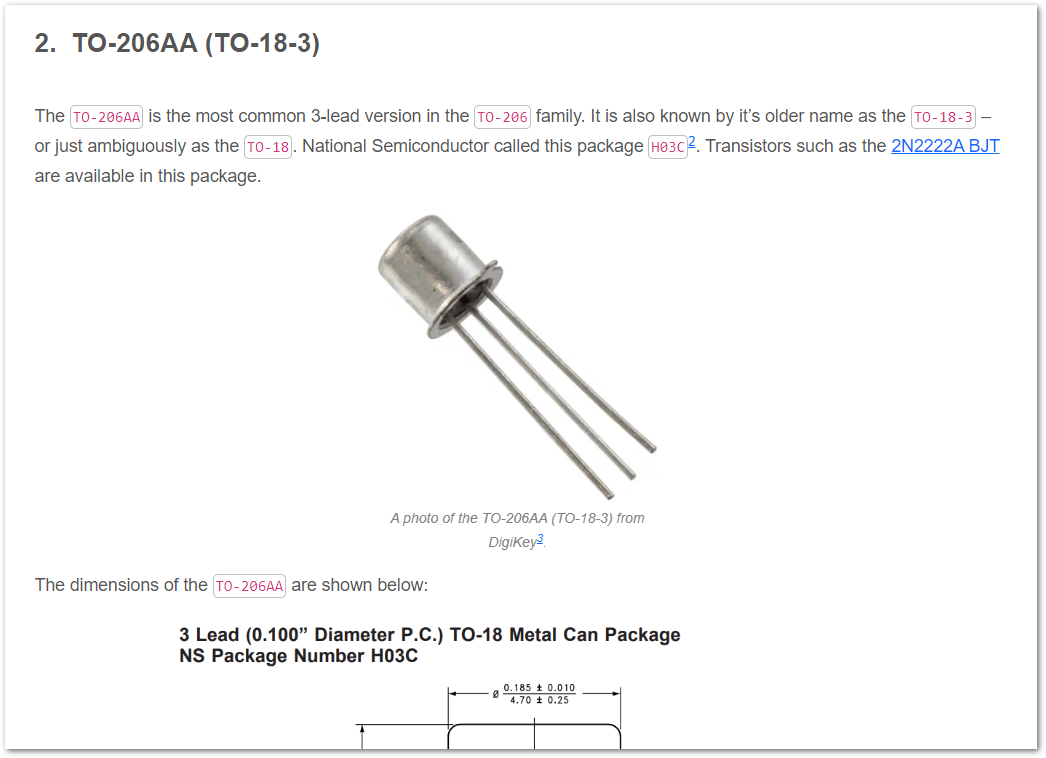
Added a new page on the TO-206 component package family.
Fixed error where the
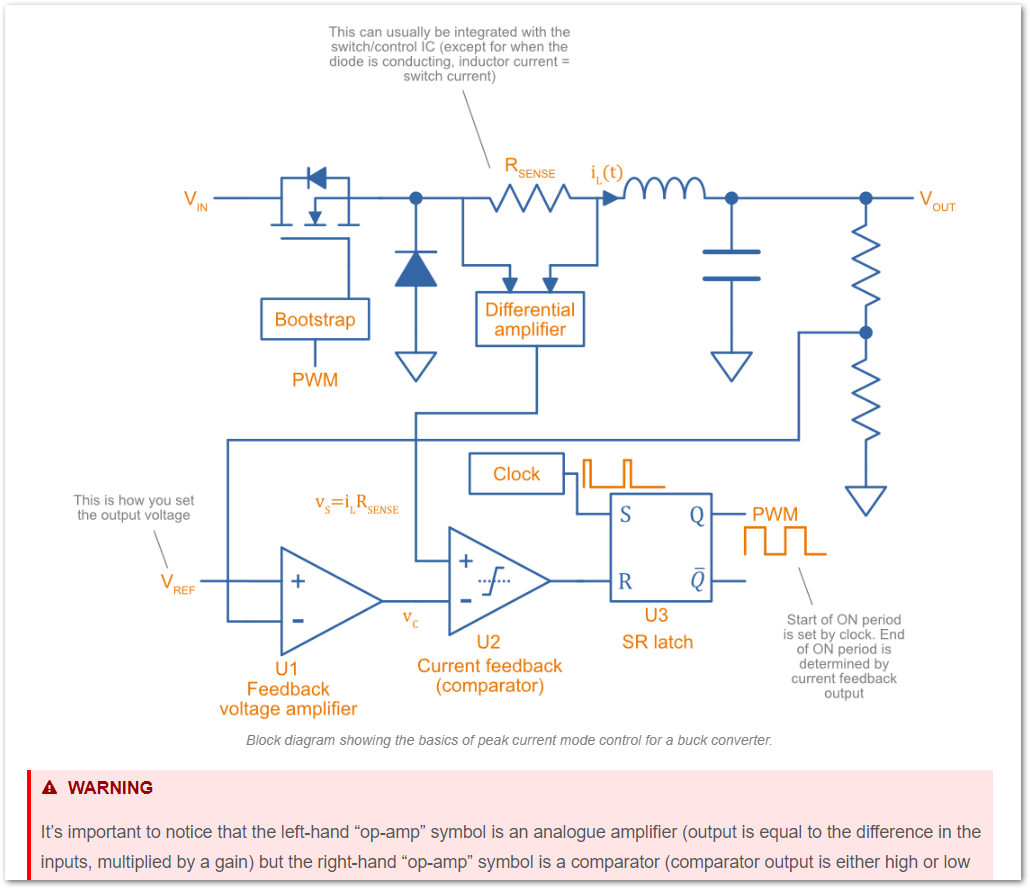
SOT-490was incorrectly labelled asSOD-490.Added a new page on Switching PSU Control Methodologies.
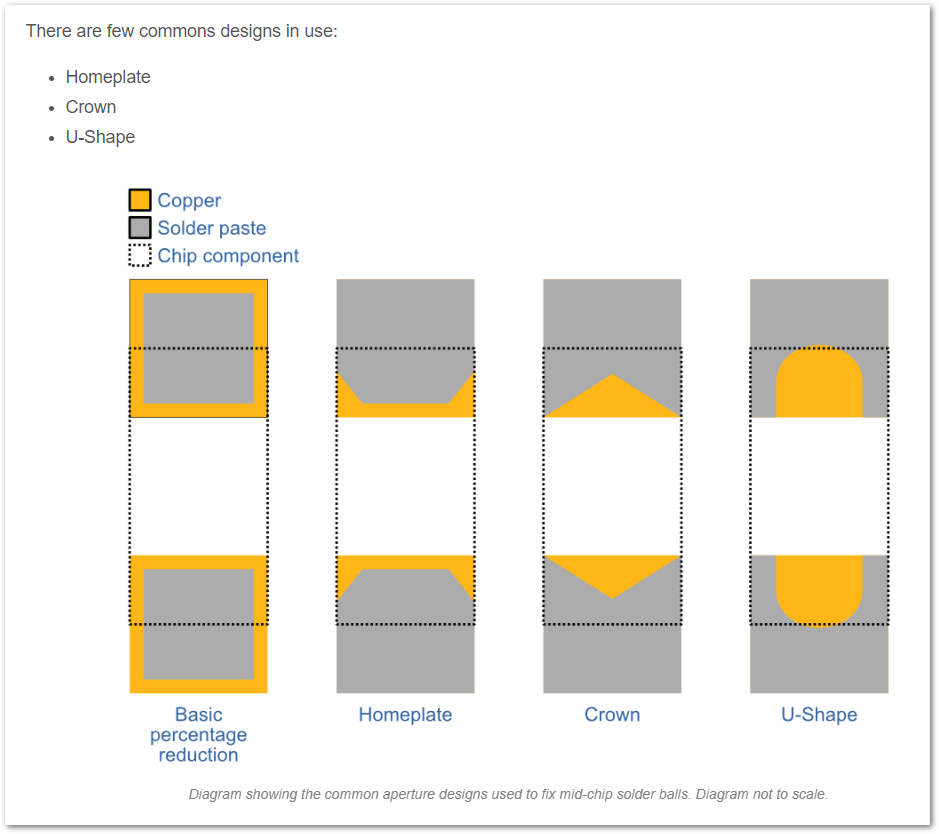
Added a new page on Mid-Chip Solder Balls.
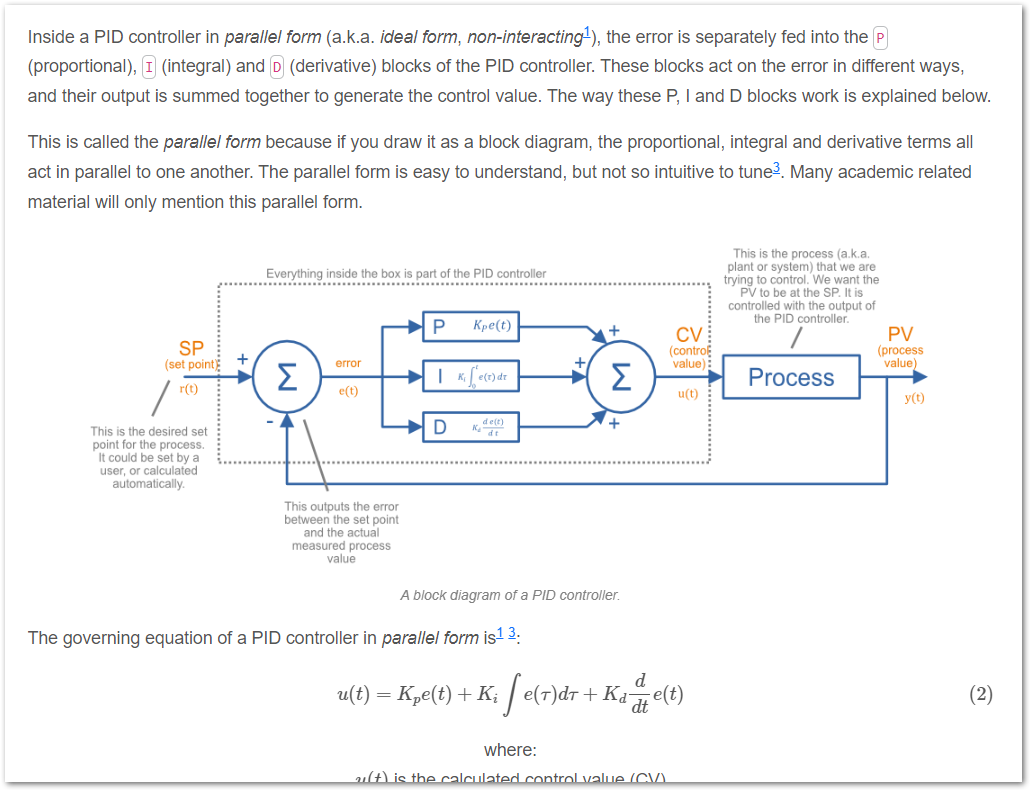
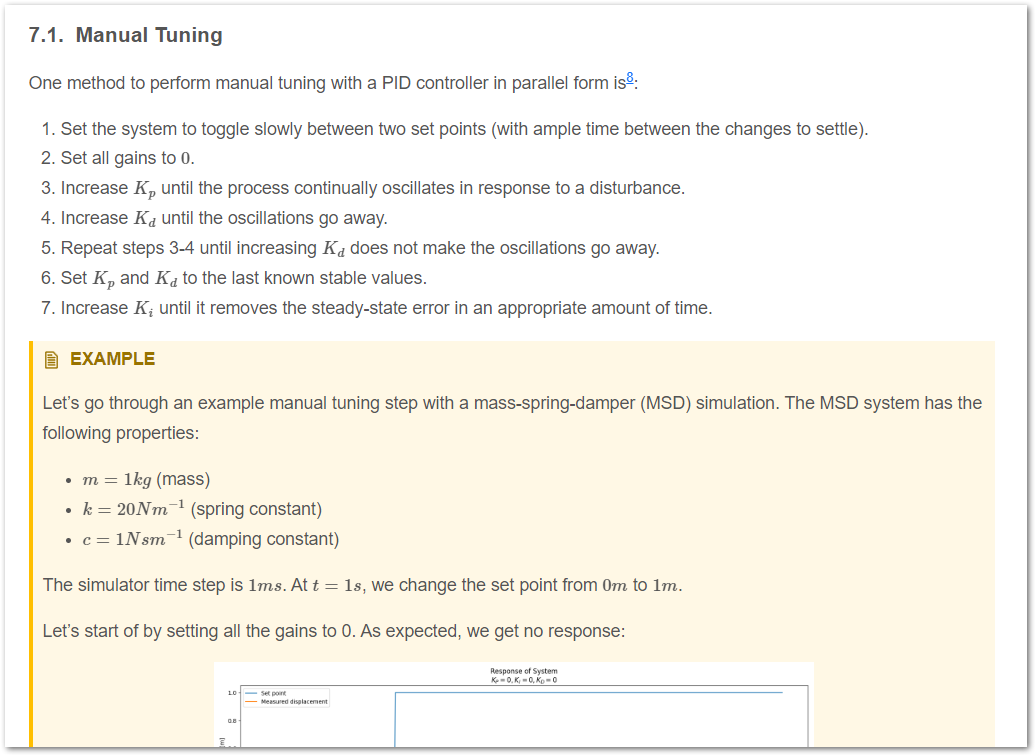
Added info on feedforward, standard form, series form, and diagrams to the PID Control page.
Added info on manual tuning to the PID Control page, including a worked example.
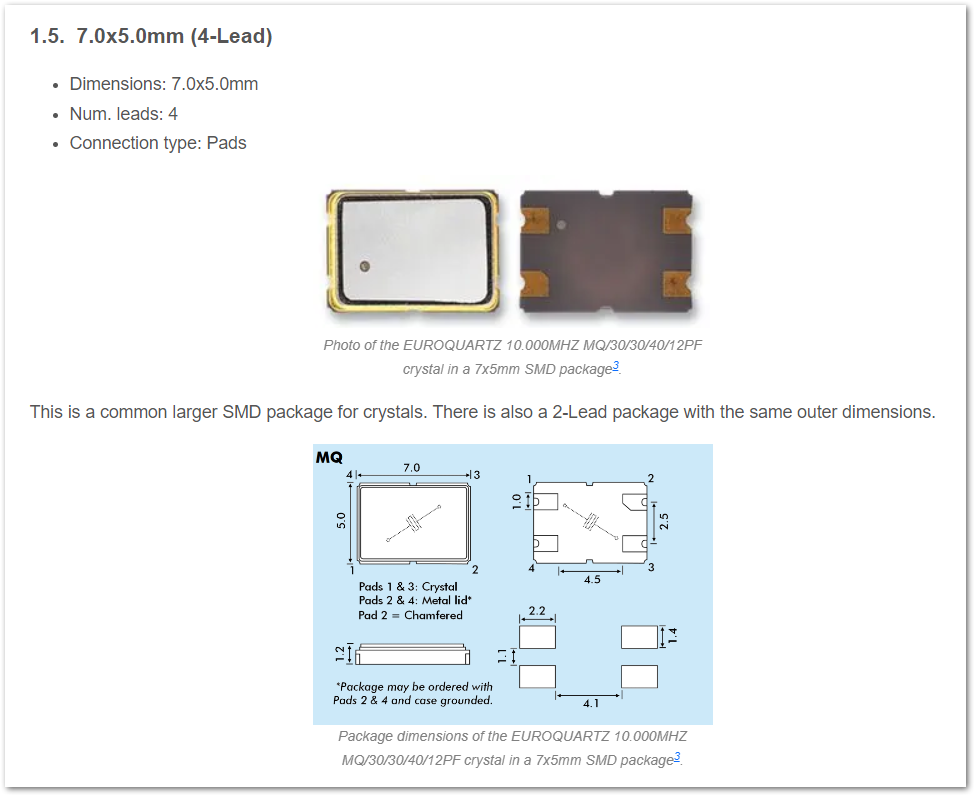
Added more info on SMD crystal packages, including the 7x5mm package.
Added a new page on Resonant LLC Converters, a form of SMPS (switch-mode power supply).

May 2023 Updates
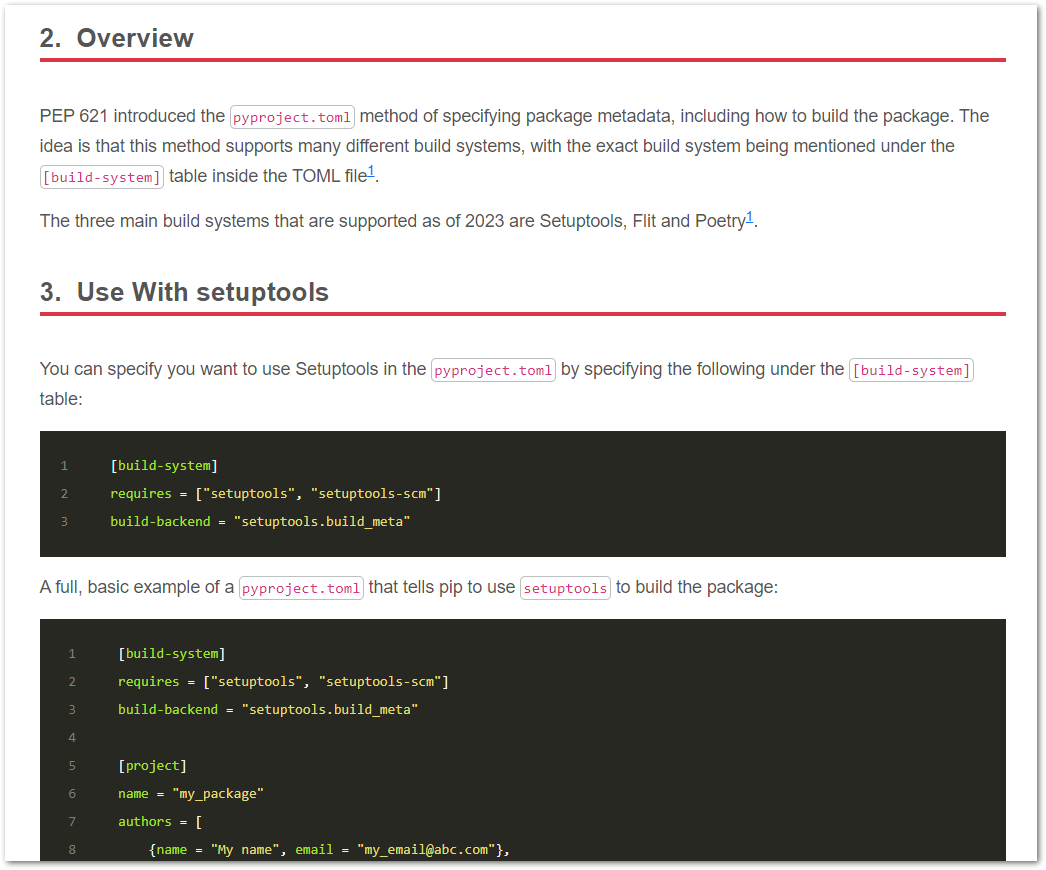
Created a new page How To Create A Python Package.
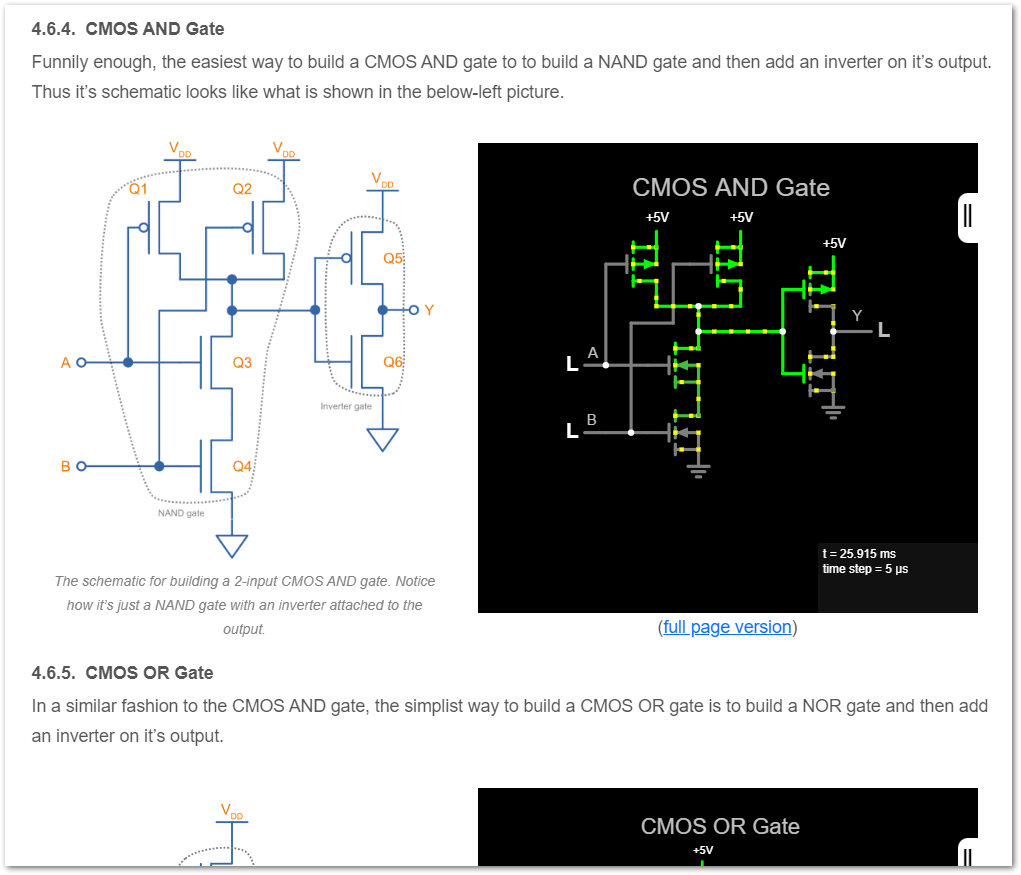
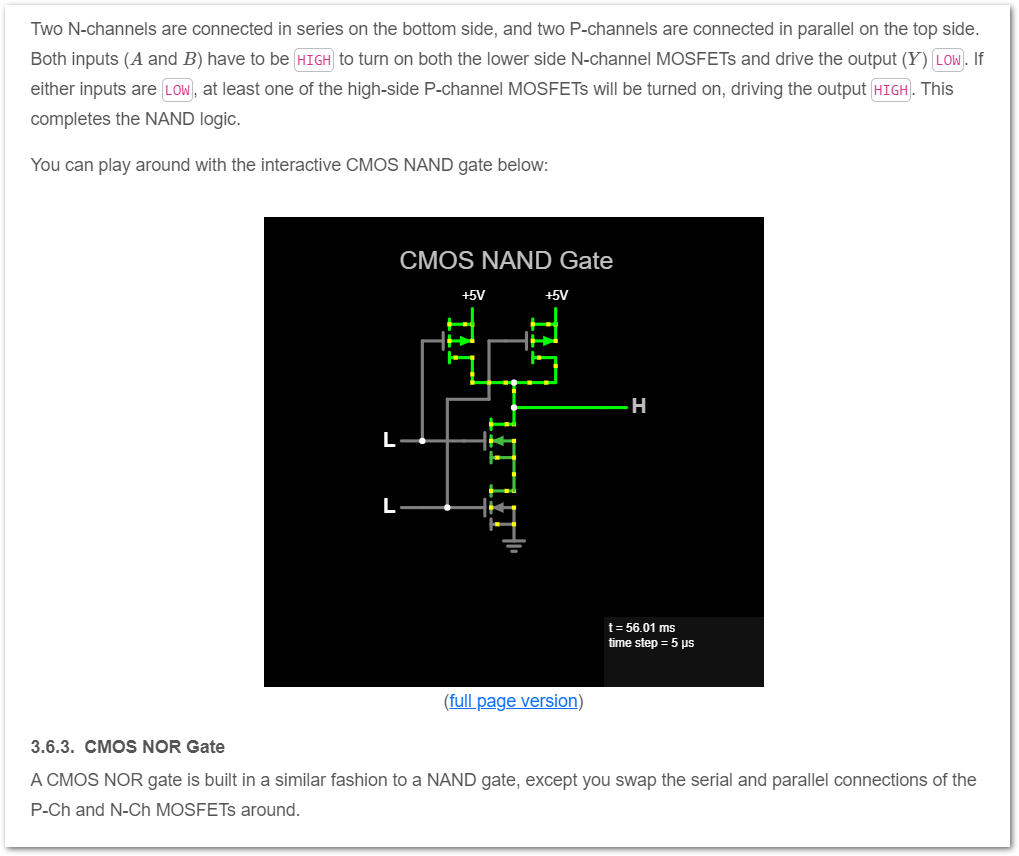
Added info and schematics of a 3-input CMOS NAND gate, CMOS AND and CMOS OR gates.
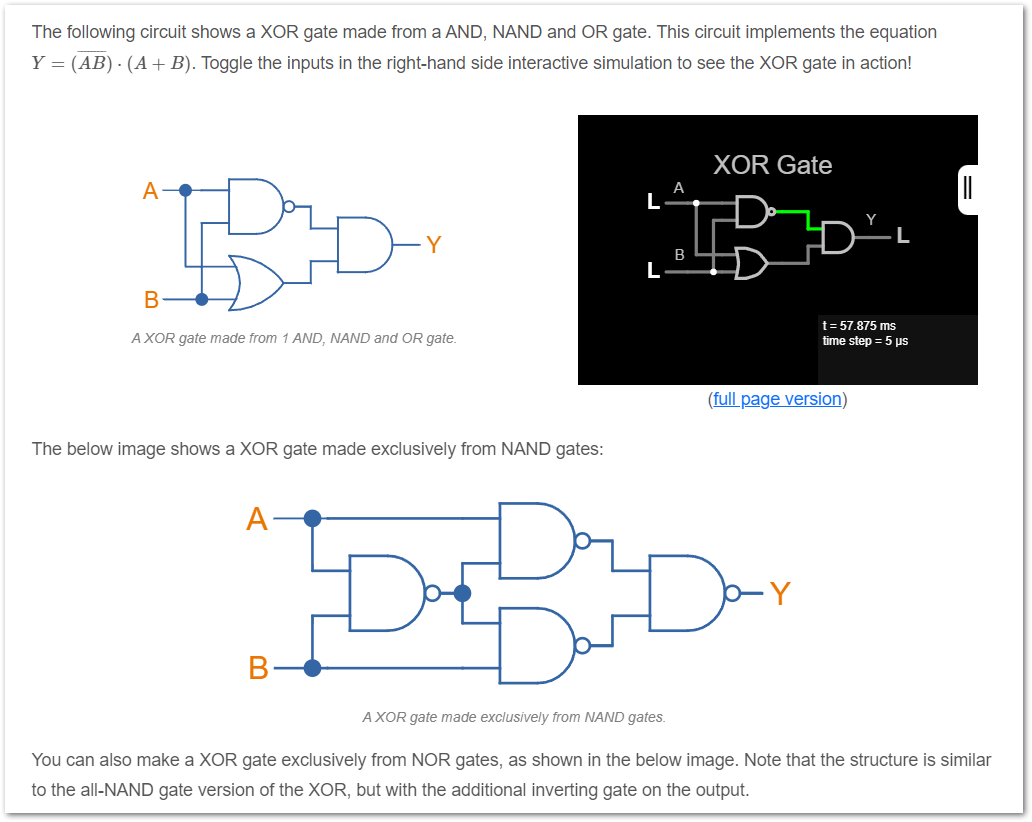
Added more info on XOR gates.
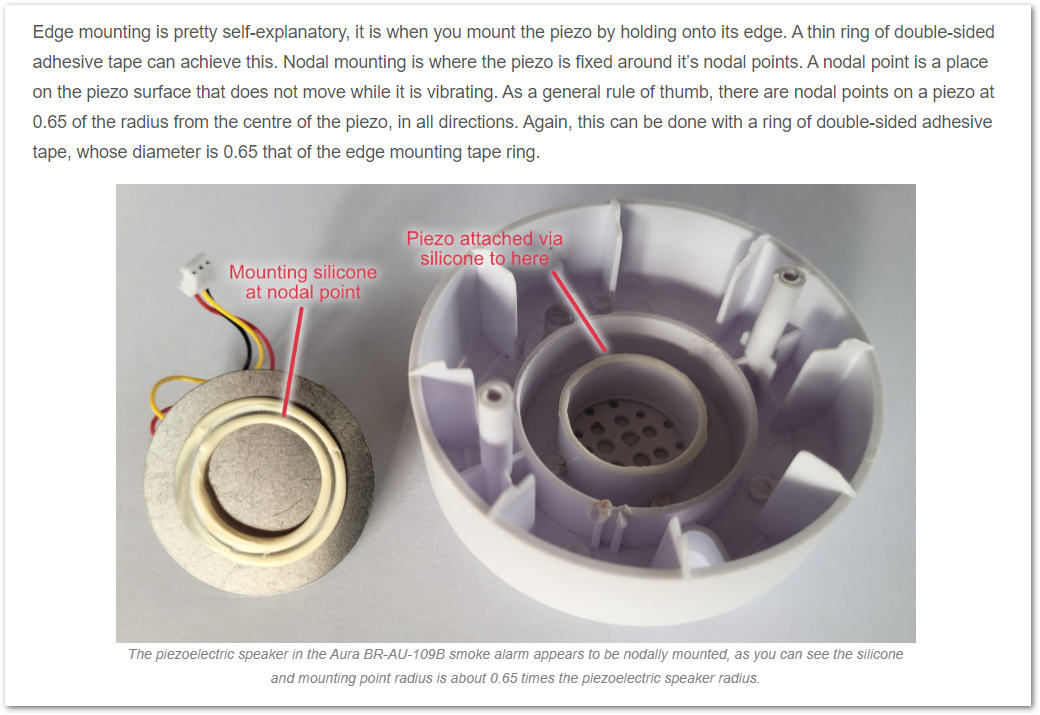
Updated the Piezoelectric Speakers page with improved schematic symbols, spelling error fixes and more info.
Converted a number of pages from AsciiDoc format to Markdown.
Added more info on Piconets and Scatternets to the Bluetooth page.
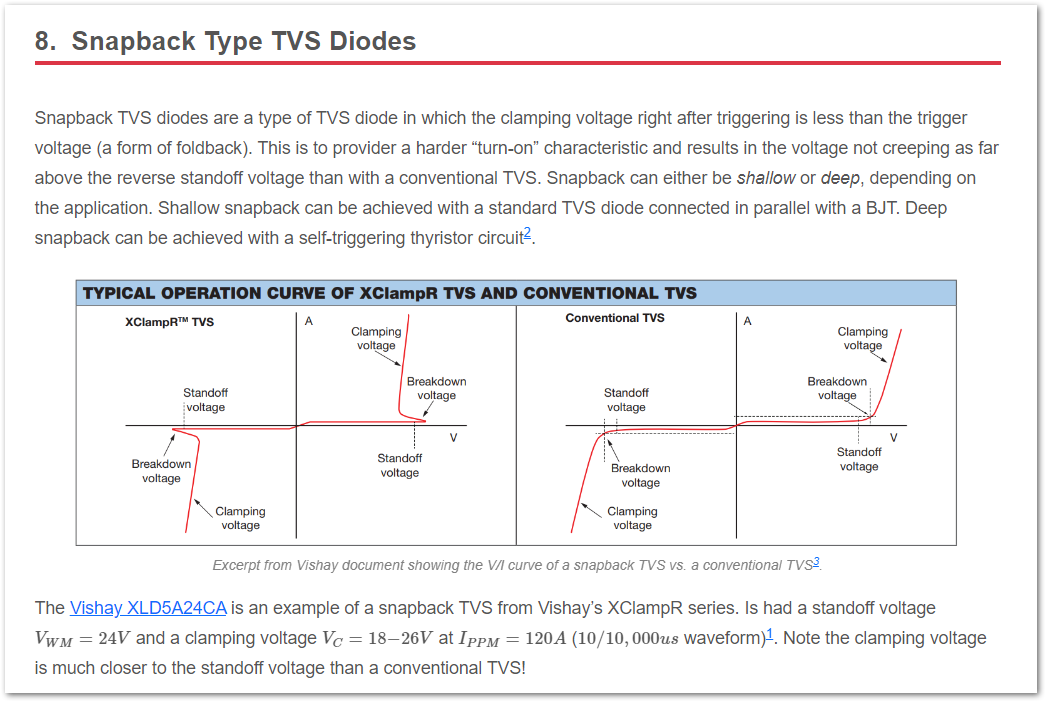
Added info on snapback-type TVS diodes.
April 2023 Updates
Converted the Digital Logic page from Asciidoc to Markdown.
Added more info on latches and flip-flops, including more schematics, info on D-type and JK flip-flops, Micro-Cap simulations, setup/hold times, and metastability.
Added info on transmission gates.
Added info on tristate inverters.
Added info, schematics and interactive simulations on digital logic gates built from NMOS technology.
Added more info, schematics and interactive simulations on logic gates built from CMOS technology.


Happy New Year 2023
Statistics for 2022
2022 saw 384k (384,000) page views! This was up from 267k last year, an increase of 117k or 44%.
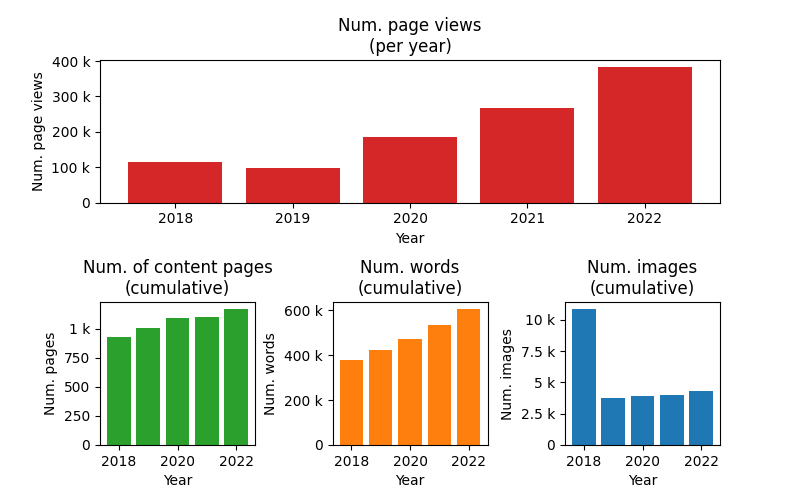
At the end of 2022 the site had 604k words, up from 536k words last year (an increase of 68k). These words were spread over 1168 pages, and included 4,319 images (and increase of 330 from 3989 images last year).
Most Popular Pages
The top 10 most popular pages, ranked by number of page views:
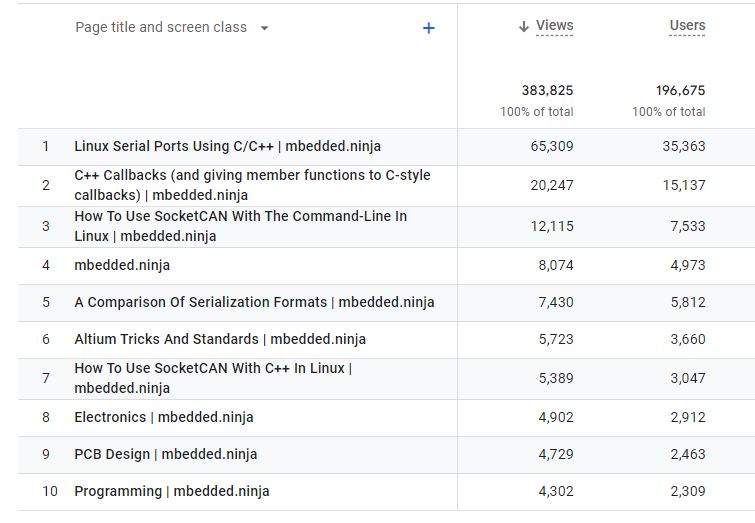
Programming related pages took the top spots of 1, 2, 3 and 5 (num. 4 was the homepage), with the first electronics related pages coming in at positions 6, 8 and 9.
Acquisition
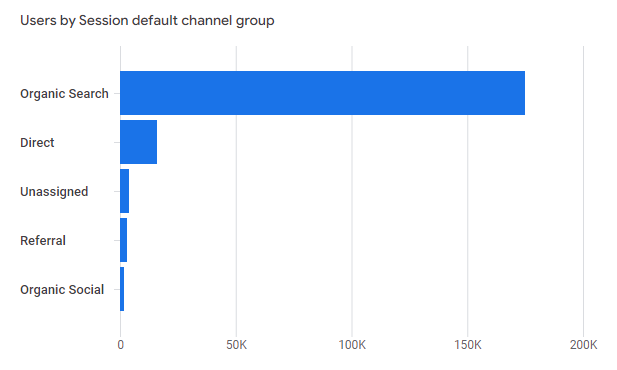
As usual, most of the traffic was from organic search (e.g. Google search engine).
Donations
In 2022 I added a Ko-fi donation button. I wasn’t expecting much (if anything), but some kind person donated $30 last year. I’ll celebrate that!
Plans For The 2023 Year
- More content, and improving existing content: As always!
- Phase out Asciidoc pages: Although Asciidoc gives me some nice features such as figure and table numbering, I’m worried enough about the future portability of the format to stick with ubiquitous markdown for now.
- Add a dark mode: It’s easy on the eyes when the background is dark! I hope to follow the somewhat industry standard and add a dark mode toggle this year to the site.
December 2022 Updates
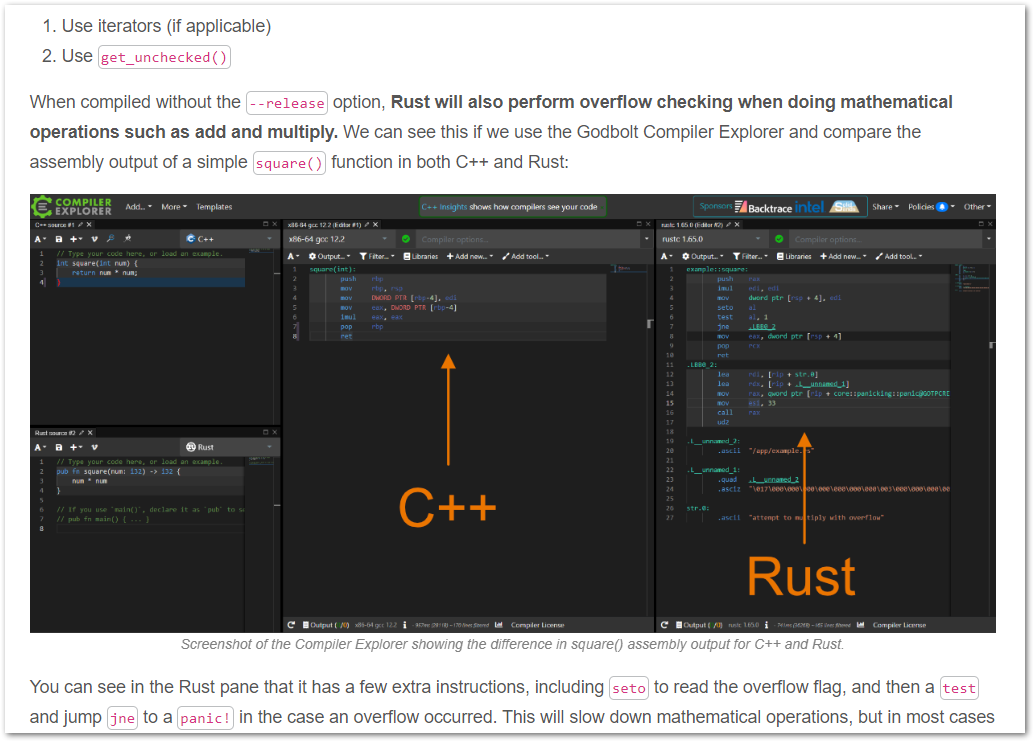
Updates to the Running Rust on Microcontrollers page.
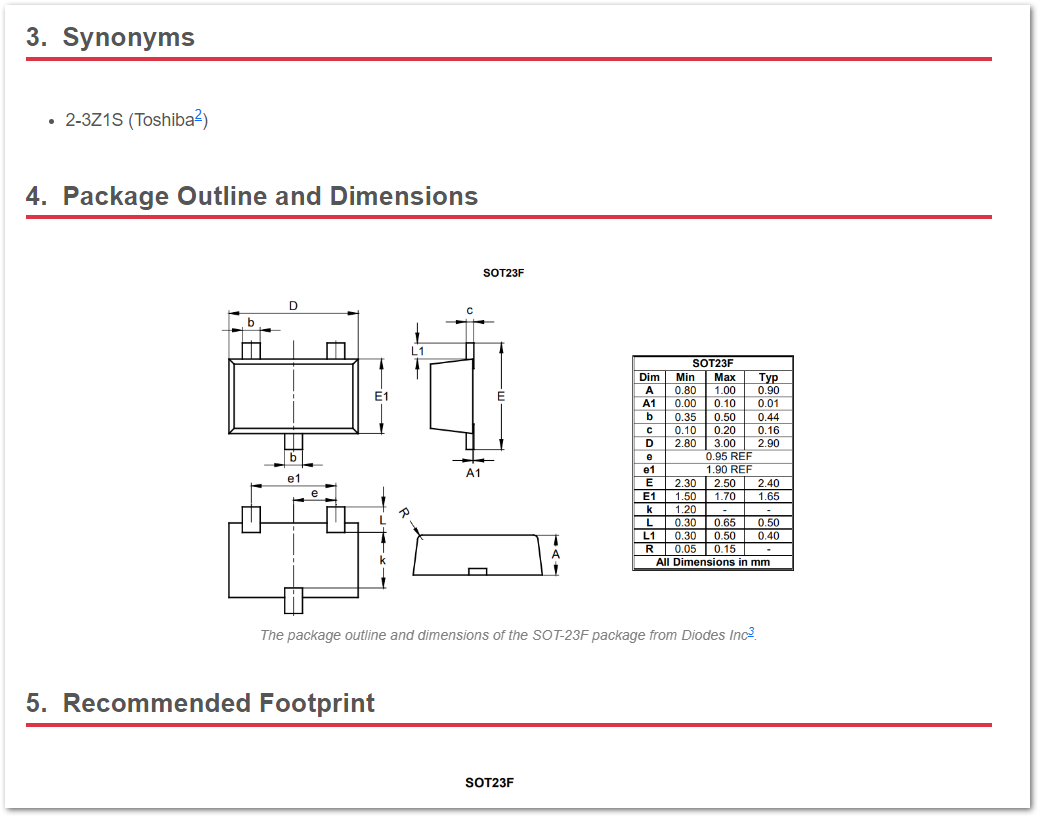
Added a new page with info on the SOT-23F component package.
{kind=link}